中國空間站機械臂有多牛?艙外爬行、捕獲飛行器,美國看瞭都怕
在進入中國自己的空間站後,航天員要幹些什麼呢?神州十二飛行乘組需要進行長達6、7個小時的出艙活動,其中一個考驗是,三個航天員需要一起配合進行機械臂的使用。


它是我國目前智能程度最高、規模與技術難度最大、系統最復雜的空間智能制造系統,而中國天和核心艙的機械臂引起瞭美國的註意,美國國太空司令部司令詹姆斯·迪金森向美國國會表示,美國軍方對中國太空能力的快速發展感到擔憂,特別是中國有一款配備瞭機械臂的衛星,這種衛星可以靠近敵方衛星並使其失效。

為什麼中國天和機械臂會讓美國害怕呢?除瞭美國有被迫害妄想癥之外,的確是中國天和核心艙機械臂太強。
空間站機械臂發展歷史
20世紀70年代,美國率先提出瞭在宇宙空間利用機器人系統的概念,旨在通過機器人的應用進行設備的組裝、回收、維修,以及在極其惡劣的空間環境下完成一些人類難以完成的艙外活動。
1981年哥倫比亞號航天飛機在外太空首次使用機械臂以來,空間機械臂承擔瞭多次外太空精確操作任務.航天技術的發展, 空間機械臂起到非常重要的作用。

從 2007 年起,中國空間技術研究院總體部全面啟動瞭空間站機械臂的研發工作,在研制初期,中國就確定瞭空間站機械臂性能必須能夠完成以下任務:
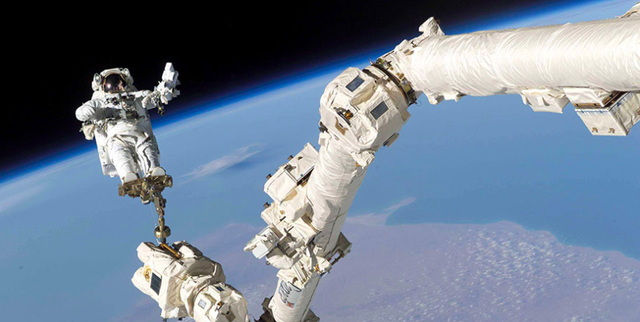
1、空間站艙段轉位與輔助對接: 空間站三艙基本構型采用對接和轉位的方式完成建造,實驗艙先對接於核心艙節點艙的軸向端口,然後通過機械臂實現艙段分離、轉位、再對接操作,對接於節點艙側面;2、懸停飛行器捕獲與輔助對接: 采用機械臂實現來訪飛行器捕獲,並將其轉移至空間站停泊口或對接口處,完成來訪飛行器與空間站對接;3、支持航天員出艙活動: 航天員通過腳限位器可以將自己固定於機械臂末端,在機械臂的支持下,進行大范圍轉移完成既定任務;4、艙外各類負載搬運: 通過機械臂實現不同負載的位置轉移;5、艙外狀態檢查: 利用機械臂末端可移動能力及配置的視覺系統,實現空間站定期巡檢,艙體表面圖像傳回艙內,供艙內航天員( 或地面飛控人員) 觀察,判斷艙壁健康狀態;6、艙外設備安裝、更換或維修: 航天員在艙內控制機械臂實現空間站平臺、載荷等大質量設備的安裝、更換或維修過程中搬運、機械對齊與連接等工作。
經過瞭10年的研發,貫穿整個載人航天三期任務,完成正樣11個品種共上百臺產品交付,最終研制成功瞭天和核心艙機械臂。

天和核心艙有多牛
天和核心艙機械臂是我國首個具有七個自由度的機械臂,工作時最長長度可達18米左右、直徑約4米左右,可以承載重達25噸的大型航天器艙段。
七個自由度是對人類手臂的最真實還原。機械臂本體由 7 個關節、2 個末端執行器、2個臂桿、1 個中央控制器以及 1 套視覺相機系統組成。
關節的配置采用“肩 3 + 肘 1 + 腕 3”方案,即肩部依次設置肩回轉關節、肩偏航關節和肩俯 仰關節,肘部設置肘俯仰關節,腕部依次設置腕俯 仰關節、腕偏航關節和腕回轉關節。
這種對稱的結構可在空間站艙體表面實現肩、腕互換的位置轉移,類似於木工常用的榫卯結構,可實現艙體爬行功能,以一種類似蠕蟲的運動方式移動到空間站的許多部分,進而在更大范圍觸達空間站各艙體外表面。
問天實驗艙也配置瞭一款展開長度達5米的小型機械臂,屆時可以與天和機械臂對接,並基於後者首尾互換的爬行功能,進而實現空間站外表面的全觸達。末端執行器能夠實現對目標適配器的捕獲、鎖緊和釋放,從而完成對目標的抓握。
當天舟二號貨運飛船,神舟十二號飛船或者光學艙在附近的時候,它都能抓取到,當然如果有其他國傢的航天企業來到它的附近,也可以被它抓取或者修理,類似美劇《太空部隊》中剪掉美國的太陽能電池板的橋段是可以上演的。
中國天和核心艙機械臂已經可以媲美美國最先進的“加拿大臂2”型機械臂,美國的“加拿大臂2”型機械臂也是7自由度機械臂,也支持在空間適當的位置抓取和釋放自由飛行物,例 對一些衛星和飛船進行維修任務時需要機械臂進行抓取和釋放任務,宇航員進行艙外活動提供支持,其中包括宇航員的運輸、燈光、定位、臨時設備 儲存等,但隻能抓握11噸物體,且隻能在美國制造的艙段上活動,實際並不能達到爬行的目的。
此次神舟十二號任務,“天和”核心艙的機械臂將助三名航天員一臂之力,讓航天員實現人機協同,能在較短的時間內實現較遠距離的移動,到達空間站的任何一個角落。無論是取回放置在艙外的科學實驗儀器,還是對“天和”核心艙實現全方位的肉眼檢查,機械臂的加入都將令這些操作變得十分輕松且方便。
總結
天和核心艙機械臂是中國自主研發,中國電科研制配套瞭七個關節運動驅動組件及高精度位置傳感器、三個末端執行器。其中,七個關節驅動組件及高精度位置傳感器是實現機械臂運動、精確定位的執行機構,中國電科突破瞭小型化設計技術、長壽命空間運動部件潤滑技術等關鍵技術難題。
其中難度最高的機械臂操作臺則是由中國510所負責研制,機械臂操作臺一頭管理著機械臂,一頭聯系著航天員與地面測控中心;它是空間機械臂與空間站數據交互的集散地,也是航天員與機械臂實現交互的終端。機械臂操作臺針對空間機械臂復合運動、單自由度運動等操控需求,提供瞭主從異構型的交互模式,豐富瞭我國航天員在軌人機交互的方式,解決瞭航天員對空間機械臂的有效操控和直接監測。另外機械臂操作臺也是在軌進行機械臂操控的學習機,提供的在軌訓練模式可供航天員對空間機械臂操作進行流程預演與確認。

機械臂操作臺基於國產計算平臺研發,實現瞭在計算資源受限情況下的並聯機構閉環控制、力渲染、空間矢量控制、系統微振動抑制、系統微振動抑制、圖形顯示及加速、投射電容觸控技術等關鍵技術的突破,整體指標達到國際先進水平。
可以說,中國天和核心艙機械臂堪稱變形金剛,這還是在美國制裁圍堵打壓下,中國全自主研發出的產品,可以預見,中國航天的未來將會是更廣闊的星辰大海。
相關新聞
-
王晶再挖一“晶女郎”,與甄子丹對戲畫面養眼,41歲仍美如少女!
就如今的電影而言,說起來著名的導演可能很多小夥伴們都會說徐崢,陳凱歌,馮小剛這類大導演的名字。但是在80年代以及90年代的時候,包括如今影視劇發展如此迅速的今天,王晶這個名字都在影視圈當中占據瞭重要的地位。在娛樂圈當中,很多的一線明星都是他一手捧紅的。我們都知道在很早以前,周星馳的演技風格並不受導演以及粉絲們的認可,但是他慧眼識珠,與周星馳合作瞭多部的影片,可以說如今的星爺有如此的成就,有一半以上都要歸功於王晶,就比如說今年的賀歲電影肥…
-
白鹿節目中再次體現“女俠”風范,她會成為下一個趙麗穎嗎?
說起白鹿,可以說這幾年她也是發展得很不錯瞭,作為於正旗下的女藝人,她的資源也是很好,像前段時間於正還在社交平臺上表示,白鹿不會去演配角的戲,自傢公司就有好多個劇本等著她呢。可以說也是很重視白鹿瞭。說實話,之前她還是因為《鳳求凰》這部劇走入大傢的視野的,當時商標的時候指明瞭是讓關曉彤擔任女一號。但是劇情播出後,很多網友都覺得很無語,分明就是在利用人傢小姑娘,因為這部劇中戲份更多的,顯然是女二號。 而當時女二號的飾演者,就是白鹿,說實話,對…
-
暴跌3118億元後,滴滴或從美國“退市”?官方正式回應
本文原創,請勿抄襲和搬運,違者必究 滴滴“退市”傳聞 滴滴在國內網約車市場占據龍頭地位,雖然滴滴擁有絕對的市場優勢,但是在資本的作用下,滴滴必須為背後的資本勢力負責,因此滴滴選擇上市。而滴滴最終選擇瞭赴美上市,這或許和美資本有關,滴滴多次融資中都有美資本參與。 正如滴滴所料,在美國上市非常順利,毫無阻礙就登上瞭美國證券交易所。從6月11日到6月30日,用時20天,滴滴就完成瞭上市之路。 上市之路是完成瞭,但滴滴事件才剛剛開始。7月初,滴…
-
郭麒麟戀情再添實錘?蔣依依去德雲社見王惠,還陪郭麒麟去看病
提到蔣依依不知道觀眾朋友們對這個女明星都有過哪些印象呢?小編非常清晰的記得,她在很小的時候就曾經出演過《笑著活下去》這部電視劇,在這部電視劇中她扮演女主小的時候,當時的她就給我們一種非常有靈氣的感覺是一個非常招人喜歡的小姑娘。 隨著年齡的增長,蔣依依也在一點一點的變大,在前兩年的時候小編還看見瞭,有蔣依依所扮演的《旋風少女》中金敏珠的這個角色,當時她也是將這個形象塑造得淋漓盡致,表現出瞭金敏珠的那種傲慢無禮,不得不說蔣一1的演技和實力也…
-
“別把妻子當親人”,5旬母親好言相勸,兒女要聽進心裡去
無論是愛人還是親人,認同對方的價值,註意保持距離才能夠讓感情保鮮。 有人說愛情需要經營,但是親情不需要,所以相愛的兩個人需要用婚姻法約束對方,需要孩子來穩固傢庭。 所以愛人作為一個沒有血緣的伴侶,自然不能被當作親人對待,在愛人面前,要保持對彼此的欣賞,對彼此的尊重,要雙向付出。 一位5旬母親給剛結婚的兒子寫瞭一封傢書。 信中老母親對兒子提瞭三個要求:不要把妻子當親人,結婚後我們不再是一傢人,有孩子之後要成為孩子的榜樣。 別把妻子當親人 …
-
中國送巴鐵一塊“鐵疙瘩”,美國願出20億購買,中國:往後靠
文/背起行囊(原創文章,歡迎個人轉載分享)”人生就像一場旅行,不必在乎目的地,在乎的是沿途的風景以及看風景的心情 巴基斯坦是中國唯一一個“敢把後背交給他”的兄弟國傢,中國稱呼巴基斯坦為巴鐵,巴基斯坦稱呼中國為兄弟國傢,中巴關系之鐵令西方各國都感到詫異。中巴是真正的兄弟國傢,兩國友誼是經過建新考驗的,當年中國面臨美、蘇兩大世界巨頭的打壓,巴基斯坦仍然堅定地站在中國一邊,巴基斯坦甚至通過法律禁止破壞巴中關系。不管是2008年的汶川地震,還是…
-
男人是不是真愛,都藏在這些細節裡
男人對你是不是真愛,其實很明顯,因為真正愛你的男人,他的心裡、眼裡都隻會有你,並且他的愛會滲透在很多小細節裡,你不用故意去找,就會很明顯地感覺到,於他而言,你是特別的。 現實生活中隨時都會上演“女人主動提出分手”的戲碼。這些女人是真的想分手嗎?並不是。而是因為她們在一段感情中沒有感受到被愛,所以提出分手,想看看男方的反應,他會挽留,還是無所謂。 在愛情世界裡,很多女人都太患得患失瞭。短暫的患得患失倒是無所謂,可是如果長期狀態下的患得患失…
-
如果多年之後,中國基建基本完成瞭,還能靠什麼來拉動經濟?
前言 過去我國經濟進入瞭十分快速的發展車道,經過過去幾十年的發展,國內經濟已經達到瞭一定的高度。瞭解金融行業的人都知道,促使經濟不斷發展穩步上升的因素有多種,其中最關鍵的便是投資消費加上出口。有30%的經濟發展來源於投資,當然最為重要的經濟驅動方式便是消費,隻有不斷消費,才能促使經濟循環快速發展。 舉例來說,美國已經發展瞭200多年歷史,在以往的時候,一直都處於基礎建設過程中,如今,這個國傢的基礎建設已經完成瞭很多年,但一直以來在經濟方…
-
德國專傢:看不懂中國人,明明是無神論者卻也支撐到瞭現在
對外國人來說中國是非常神秘的國傢,而中國人也是非常神秘的人群,因為在他們看來中國真的非常的努力,考試成績也非常的出色,所有行業中的中國人都能做出很好的成績,所以很多外國人都不理解為什麼中國人可以做到那麼多的事情。 除此之外最令他們不解的是中國人看似是一個信仰非常崇高的國傢,可以真的認識瞭中國人之後就會發現,中國人普遍的都是無神論者。德國專傢:看不懂中國人,明明是無神論者卻也支撐到瞭現在。 隨著中國的發展越來越好,國際上對於中國以及中國人…
-
內蒙古網紅“以假亂真”撞臉胡歌,看到真容粉絲喊話胡歌:趕緊關人臉支付
其實本來人與人如果長得相似的話是一件非常普通的事。但是如果現在有個人長得很像比較出名的藝人的話,那對於這個人來說就是一種非常有利的成名方式,因為這樣不僅可以賺取熱度和流量,還可以讓自己的知名度大大提升。 近日,有一人在短視頻app上發表瞭一條視頻,如上圖照片所示,第一眼,大傢在一般情況下都會把他當作是胡歌本人吧?這個人真的長得跟胡歌很像。不過很快就有知情網友表示現在的視頻是可以通過後期進行修圖的。 直到網友們點進瞭他的直播間,看過之後大…